粉体行业在线展览
粉体行业在线展览




直接联系
建科环能(北京)科技有限公司


美国
面议
2522
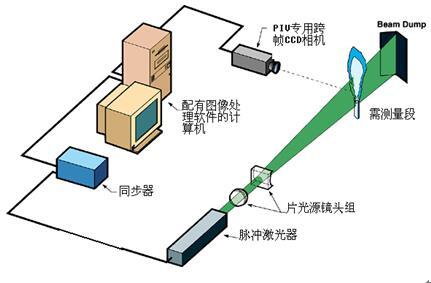
粒子图像测速仪PIV
粒子图像测速技术(PIV) ( Particle Image Velocimetry)是流动显示技术的定量化延伸,是二十世纪末流体力学测量仪器和实验方法的重大发展,由于可以得到瞬时全场的速度信息,相比以往单点的流速测量技术,PIV可以获得瞬时流动结构的真实信息,在流动结构的研究方面是其他手段无法相比的。
系统组成与整体性能
一套完整的PIV系统包括光源系统(双腔脉冲激光器,导光臂和片光源透镜组),图像采集系统(高分辩率跨帧CCD相机,64位专用高速图像数据采集板),控制协调系统(同步器),以及专用PIV图像数据处理和流场显示系统(Insight软件包及其外部接口)。
系统组成与整体性能
一套完整的PIV系统包括光源系统(双腔脉冲激光器,导光臂和片光源透镜组),图像采集系统(高分辩率跨帧CCD相机,64位专用高速图像数据采集板),控制协调系统(同步器),以及专用PIV图像数据处理和流场显示系统(Insight软件包及其外部接口)。
工作模式 | 支持 CCD 工作方式(互相关、自相关) 提供支持胶片工作接口(自相关模式) |
速度范围 | **可测速度不小于200m/s |
测量区域 | 不小于600mm*400mm |
空间分辨率 | 小于1mm*1mm(由镜头视场确定) |
速度测量维数 | 3维 |
主要部件性能参数
I脉冲激光器 | 1 套 YAG200-NWL_532/266 | |
PIV系统中激光器作为照明光源,采用美国NewWave公司的脉冲频率15Hz,能量200毫焦/脉冲大功率Nd:YAG激光器。激光器主要参数如下: | ||
激光器型号 | YAG200-NWL_532/266 | |
名称 | 美国NewWave公司产双钕:钇铝石榴石激光器 | |
激光功率 | 200 mJ/Pulse@532nm;30mJ/Pulse@266nm | |
激光器脉冲频率 | 15Hz | |
脉冲持续时间 | 3—5 ns | |
光束直径 | 6 mm | |
发散角 | 小于4 mrad | |
工作方式 | 自触发、外部触发,受同步器控制 | |
输入电源要求 | 单相输入 220V±10% , **电流20A,50/60 Hz | |
备注 | 激光器(含电源)由生产厂商保修一年 | |
II光臂及片光源透镜组 | 1 套 TSI 610021 610015 |
光臂的作用是为了灵活调节片光源的位置,满足测量不同截面时片光源的灵活调整。片光源透镜用于形成PIV系统的照明光路系统。工作原理是,脉冲激光器产生的激光脉冲光束首先经过一个凹柱面镜,形成一个一定角度的扇形光片,光片的厚度约等于激光光束的直径,约4mm,这个厚度对PIV测量来说太厚,因此,需要额外的一个球面镜将光片收缩到0.5~1mm厚度的片光。为了适应不同大小和测量距离的情况的需要,该套镜头组中采用了两个镜头组,分别为两个不同的凹柱面镜和两个不同的球面镜。 主要参数如下: | |
型号 | 610015 610021 |
名称 | 光臂及片光源透镜组 |
**输入功率 | 500mJ/Pulse |
组件 | 多关节光臂一套(每关节均可360度旋转,全 展开可达1.8米长) 镜头基座一套 球面镜2个:焦距500mm,1000mm 柱面镜2个:焦距-25mm,-15mm 柱面镜到球面镜连接适配器一套 |
III PIV专用CCD | 两套 TSI 630062 & 630062-ST |
TSI的PIV系统的CCD为专门设计的,以便于用于PIV系统的测量。它在工作时序上不同 于普通的摄像头结构。主要参数如下: | |
型号 | 630062 630062-ST |
名称 | PowerView Plus 11MP 自相关/互相关CCD 相机 |
分辨率 | 4K X 2.6K |
祯频率 | 4.8祯/秒 |
镜头接口方式 | 标准Nikkon(F Mount) |
控制方式 | Free Run/Triggered Exposure/Triggered Double Exposure |
12位灰度图象数据 | |
*小跨祯时间 | 200ns |
输出 | 12位数字化输出,输出信号标准LVDS |
CCD包含CCD阵列激光保护罩 | |
备注: 包含配套的专用高速接口板及所有电缆 1.630062 CCD配套接口板一块 2.支持LVDS数据传输标准 3.全数字化数据传输 | |
IV同步器 | 1 套 TSI LaserPulse 610035 | |
同步器是TSI的PIV系统的时序控制机构。系统的所有其他部件的工作指令均由同步器控制,它负责按照程序设定各个部件。 | ||
型号 | 610035 | |
名称 | 同步器 | |
工作方式 | 受计算机控制; | |
同计算机连接方式 | RS232; | |
时间分辩率 | 1ns | |
输出信号 | TTL 电平; 一对 FlashLamp 和 Q-swithch 信号; 外触发信号输出以控制其它外部设备; 锁相环信号输入; | |
输入功率 | 240VAC,2A | |
附件 | 有关电缆一套; 安装及使用说明书一套; | |
有别于通常采用插入计算机的同步卡或时序卡,TSI的PIV系统是**采用立同步器,该系统控制的时间分辨率与计算机性能无关,控制信号的时间准确性和任何其它外部设备也无关。它负责精确的接收外部触发信号以协调各部件的工作时序,这一点在常规PIV系统的条件采样过程中极为重要,对于某些特殊应用,如旋转机械流场的测量问题,这种测量需要的同步精度要求极高,一般采用时序卡的系统根本无法完成如此精度的触发测量。特别的,如果触发精度受到计算机性能和正在处理的任务的影响时,测量本身的不可控因素可能导致整体测量的完全失败,这样对于测量的成本,尤其是针对高速流动问题或者高湍流度问题的实验成本控制都是非常不利的。这种独立设计使得PIV实验本身的各部件时序控制和用户选择的计算机性能和档次没有关系,这也是TSI的PIV系统不会刻意要求用户配置高档次的计算机系统的根本原因。本次配置中的610035型同步器是TSI公司PIV系统中的高端同步装置,时间分辨精度达到1ns。PIV技术的创始人、TSI公司流体测量系统的高级顾问——Adrian教授曾经使用这种系统在Illinois大学成功进行了高速爆轰问题的测量和研究工作,这种测量问题的时间定位要求是非常严格的。同时这种同步装置在高速PIV及激光诱导荧光(LIF)的设备也可以使用。
VI 图象采集分析系统 | 1 套 TSI INSIGHT3G-SEC MODULE3G-2DPIV MODULE3G-STRPIV MODULE3G-PLIF |
名称 | 立体PIV/LIF图象采集及数据分析系统 |
功能 | Windwos XP 全 32-bit 软件包,系统通过RS232采用计算机命令控制; |
对CCD方式,实时显示采样的图象数据,在线显示方向矢量及标量场; | |
执行互相关和自相关分析;支持多CPU结构的并行相关处理 | |
内嵌Hart相关算法引擎,支持进行Hart相关处理,超细化处理流场速度分布,*小可达到的查问域可达4×4个象素得到一个速度矢量 | |
可对图象进行常规图象处理; | |
可对不同的片光源类型所获得的图象进行处理; | |
实时显示查问域及其相关时的峰值; | |
自动调整查问域的大小以获得**的相关峰值; | |
计算点、线、图象中部分区域、及全部区域的速度; | |
后处理可计算平均速度、均方根值、涡量、剪应力、雷诺应力等;对速度矢量场进行有效性检验,并对其所缺矢量填空。 | |
内置(嵌入在Insight软件中)TECLPOT流场分析绘图软件; | |
采用**背景处理技术,基于Matlab 工具箱详细的时序图像分析 | |
备注 | 本软件含有Insight3G-PIVLIF 软件加密狗一个; |
筷子称
UNI800C多物料配料控制仪
PicoFemto扫描电镜原位液体-电化学测量系统
在体皮肤拉曼分析仪
在线HPXRF检测设备
BSD-PB(气液法)
佐竹搅拌扭矩测试仪
μBenchCAT 反应评价装置系列
电子天平
0~10%糖度
J-CONTROL雷达料位计JFMCW-80C0A1A1A4A1


